MVTEC MERLIC 5.7.0 Linux完整版和运行版的扩展MERLIC 5.7.1 Tools for the runtime version
MVTEC MERLIC 5.7.0 Linux完整版和运行版的扩展MERLIC 5.7.1 Tools for the runtime version
文件名: merlic-5.7.0-tools_all.tar.gz
文件大小: 1605361 字节 (1.53 MB)
修改日期: 2025-04-02 18:40
MD5: 53a1241ad100732fd8edd55db0ab021b
SHA1: 7e51089ea91bae312b1f2072636904869dc8c03f
SHA256: 3ff0b974598e1c101d147905976048101e0f0241f6eef43dd32764c35b5e8f06
CRC32: 2e032a8a
百度网盘下载:
MVTEC MERLIC 5.7.0 Linux完整版和运行版的扩展MERLIC 5.7.1 Tools for the runtime version
http://visionbbs.com/thread-33716-1-1.html
(出处: 石鑫华视觉论坛)
MERLIC 5.7 的最新功能
MVTec 于 2025 年 4 月 3 日发布了新版本 MERLIC 5.7。新版本 5.7 提高了 MERLIC 运行环境(RTE) 的可用性,并优化了通信接口的操作。 MVTec MERLIC 集成了强大的传统机器视觉方法和最先进的深度学习技术。此外,其图形化用户界面可帮助用户直观地创建完整的机器视觉应用。
最新改动?
MERLIC 5.7 通过直接在 MERLIC 运行环境 (RTE) 中管理通信插件,优化了与机器控制系统的集成。这减少了组件,提高了可用性并简化了部署。此外,MERLIC 前端现在可用于 Linux,并可用作远程前端,从而实现灵活的系统架构。新的示例 Docker 文件和脚本有助于容器化部署和集成到现有工作流程中。
进一步简化了与机器控制系统的集成
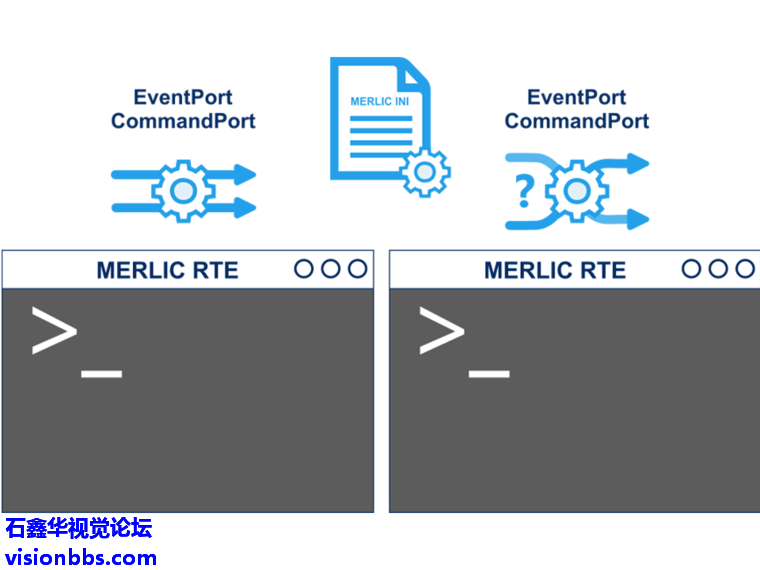
在 MERLIC 5.7 中,MERLIC 与机器控制系统的集成流程得到了进一步优化。现在,配置和运行通信插件仅需 MERLIC Runtime Environment (RTE),无需像之前的版本那样启动和管理额外的进程。
通过将插件管理集成到 RTE,减少了所需的组件,提升了可用性,并进一步简化了部署流程。例如,现在可以并行运行两个 MERLIC RTE 实例,而无需手动配置端口。此外,插件消息现已直接记录在 MERLIC RTE 日志文件中,大大简化了调试过程。
MERLIC 前端现已支持 Linux
除了 MERLIC 运行环境 (RTE) 之外,MERLIC 前端 (Frontend) 现在也支持 Linux。从 MERLIC 5.7 开始,用户可以直接在 Linux 系统上可视化图像处理结果。
MERLIC 前端不仅可以在本地运行,还可以作为远程前端在独立的 Linux 系统上运行。这种灵活的系统架构允许将图像处理和可视化分离,以优化资源使用,例如:在独立终端上运行前端,或通过网络实现远程监控。
示例 Dockerfiles 和脚本用于容器化部署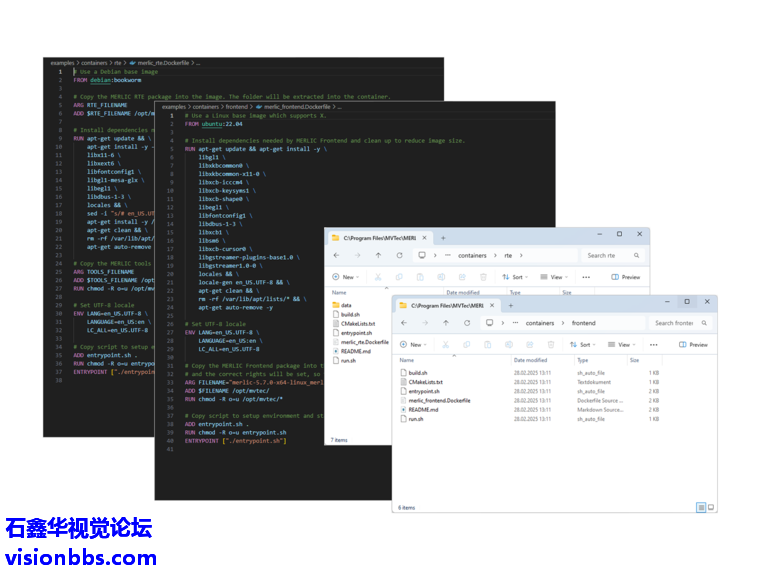
提供 Dockerfiles 和相关脚本,以便在容器化环境中轻松部署 MERLIC。这些示例可用于快速设置 MERLIC 运行环境 (RTE) 和 MERLIC 前端 (Frontend),实现更灵活、可扩展的部署方式,适用于工业自动化和云端应用。
Release Notes for MERLIC 5.7.0
This document provides the release notes for MVTec MERLIC 5.7.0 , as released in April 2025 .
Contents
Supported Operating Systems
Major New Features
Compatibility
Image Source Manager
Process Integration
Interfaces for Process Integration
MERLIC RTE Setup
MERLIC Creator
MERLIC Frontend
Tools
Examples
Documentation
Installation
Licensing
Miscellaneous
Release Notes for Windows Systems Only
Release Notes Linux Systems Only
Known Issues
Supported Operating Systems
MERLIC is available for Windows and Linux systems. On Windows, all components of MERLIC can be used. For Linux systems, currently only the runtime environment of MERLIC , MERLIC RTE , and MERLIC Frontend are available.
Windows
MERLIC 5.7.0 is available for Windows 10 ( 64-bit , version 1903) or newer.
Linux
MERLIC RTE and MERLIC Frontend are available on PC-based and Arm-based Linux systems (kernel version 5.4 or newer).
Developing the MERLIC Vision App is still done on a Windows system with the MERLIC Creator. The application can then be used with MERLIC RTE and MERLIC Frontend on the Linux system. Cameras can be set up remotely with the help of MERLIC RTE Setup .
System Requirements
A detailed description of the system requirements for installing and using MERLIC on Windows and Linux systems is provided in the MERLIC manual on the page "System Requirements".
Major New FeaturesSimplified Integration of MERLIC into Machine Control
In MERLIC 5.7, the process of integrating MERLIC into machine control has been further streamlined. Configuring and running communication plug-ins now only requires MERLIC Runtime Environment (RTE), eliminating the need to start and manage an additional process, as was necessary in previous versions. By integrating plug-in management into RTE, the number of required components has been reduced, usability improved, and deployment further simplified. For example, it is now possible to run two MERLIC RTE instances in parallel without manually configuring ports. Additionally, plug-in messages are now logged directly in the MERLIC RTE log file, which significantly simplifies debugging.
MERLIC Frontend now Available for Linux
In addition to MERLIC Runtime Environment (RTE), MERLIC Frontend is now also available for Linux. As of MERLIC 5.7, this allows visualization of image processing results directly on Linux systems.
The MERLIC Frontend can be run not only locally but also on a dedicated Linux system as a remote frontend. This enables a flexible system architecture, such as separating image processing and visualization to optimize resource usage, operating the frontend on separate terminals, or enabling remote monitoring over a network.
Example Dockerfiles and Scripts for Containerized Deployment
The simple deployment of machine vision applications across different environments is becoming increasingly important. Starting with version 5.7, MERLIC includes example Dockerfiles and scripts for creating custom containers. This simplifies the setup process and enables seamless integration of both MERLIC Frontend and MERLIC RTE into existing containerized workflows. This enhances flexibility in deploying and managing MERLIC.
Compatibility
Since the last MERLIC version we have been working hard to improve MERLIC in every way. This has, however, resulted in a few incompatibilities. We apologize for the inconvenience.
Communicator
The headers of the C++ plug-in support library now include only those headers containing the definitions needed by each header. This eliminates the dependency on transitive includes. However, this means that in some cases, it is possible that custom communication plug-ins that use a previous version of the support library and rely on transitive includes may no longer compile with the new version. This issue can typically be resolved by including the support library headers that define the types and functions from the support library that are used by the plug-in code. Refer to C++ Core Guideline SF.10 for reference. More information.
MERLIC Creator
Due to the new support for adding tool notes, the internal file version of MERLIC Vision Apps (MVApps) has been increased. Therefore, a warning will be displayed when opening an MVApp created in MERLIC 5.7 in the previous MERLIC 5.6 version. However, the functionality of the MVApp is not affected. In case of MERLIC versions lower than 5.6, no warning appears. If the respective MVApp contained tool notes, they will be lost when saving the MVApp in the previous MERLIC version. More information.
Tools
Due to the improvements at the "Read QR Code" tool, MVApps relying on the previously less restrictive behavior for the candidate search should be checked and adjusted if required. More information.
Miscellaneous
The minimum system requirements for using MERLIC on Linux systems has changed. MERLIC now requires at least Linux kernel version 5.4 or later, as well as glibc version 2.31 or later.
Due to the new underlying HALCON version, the behavior of existing custom tools may have changed since the last MERLIC version. Therefore, it is recommended to check the functionality of existing custom tools in this MERLIC version. More information.
Image Source Manager
Fixed Problems
When changing a camera parameter value in the Image Source Manager (ISM) and then reconnecting the camera without saving the changes beforehand, the camera parameters were loaded with the saved values from the respective configuration file but these changes were not visible in the graphical user interface of the MERLIC RTE Setup. This problem has been fixed.
Process Integration
New Features
MERLIC now supports using two instances of MERLIC RTE at the same time without any manual configuration effort. MERLIC RTE will automatically choose free ports for the exchange of "commands" and "events" with communication plug-ins. It is no longer required to set fixed ports for each MERLIC RTE instance via INI configuration files, using the " CommandPort " and " EventPort " settings, or via the command line options "-- command_port " and "-- event_port ". However, it is still possible to define fixed ports if desired. In previous MERLIC versions, MERLIC RTE did not start if any of the ports was occupied. Now, MERLIC RTE will try to use the defined ports, and if any of the ports are occupied, arbitrary free ports will be used as fallback. This simplifies the simultaneous use of two separate MERLIC RTE instances on the same machine as it is no longer necessary to arrange for distinct ports to be used by either instance.
MERLIC RTE now provides the services to configure communication plug-ins via MERLIC RTE Setup and to manage the plug-ins at runtime. It is no longer necessary to start a dedicated MERLIC Communicator application. Therefore, MERLIC Communicator has been removed as a standalone user-facing executable. On a technical level, the plug-in libraries are now loaded and executed by distinct plug-in host processes to provide isolation amongst plug-ins and towards the runtime environment. These host processes are, however, not intended to be launched by the user anymore. Instead, only MERLIC RTE needs to be started to set up and control the execution of communication plug-ins.
The logging capabilities of MERLIC RTE have been extended. As part of the changes to MERLIC RTE, the log files for MERLIC RTE ( merlic_rte_*.log ) now contain information on communication plug-ins and their communication with MERLIC. Previously, this information was stored separately in the log files for MERLIC Communicator which is not required anymore. All logging information regarding the process integration mode is now provided in the same log files. A new entry is generated with the message's log level, the plug-in that generated the entry, and the logged message itself. This simplifies configuration and monitoring by providing all necessary logging details for MERLIC RTE in one place.
Enhancements
CommandTimeout : Timeout for commands sent by communication plug-ins in case MERLIC RTE is not responding.
ConfigDir : Directory for the JSON configuration files of communication plug-ins.
PluginDir : List of directories where to look for communication plug-ins.
As part of the changes to MERLIC RTE, all configuration settings for MERLIC RTE and communication plug-ins can now be set in the same INI configuration file for MERLIC, for example, in the default "MERLIC5.ini". There is no need for a dedicated "Communicator.ini" file anymore. Previously, the following settings for communications plug-ins could only be set in the "Communicator.ini" file or via command line options for the corresponding "merlic_communicator.exe" executable. Now, these settings can be set in the INI file for MERLIC in the [Communicator] section:
Furthermore, the executable for MERLIC RTE ("merlic_rte.exe") has been extended by the new command line option " --plugin_config_ports ". It allows specifying ports for the configuration services of communication plug-ins and corresponds to the INI file setting " PluginConfigurationPorts ". With the new command line option, it is now possible to define all kind of ports for MERLIC RTE via command line.The startup duration of MERLIC RTE and the MERLIC RTE Setup has been improved. During the validation of the available recipes, all deep learning models and training images used by the referenced MVApps were extracted which prolonged the duration for the startup. In the new MERLIC version, the validation has been revised and the respective models and training data are no longer extracted. This has improved the overall startup duration for MERLIC RTE and MERLIC RTE Setup, especially when using many recipes with deep learning models and training data. This enhancement also improves the duration for querying the available recipe files which can be triggered by communication plug-ins during MERLIC RTE.
Fixed Problems
Some of the headers in the C++ plug-in support library did not include all of the necessary standard library and plug-in support library headers. In many situations, this did not cause problems in practice because plug-in code using these headers would still compile due to transitive includes. However, this imposed an implicit requirement on the order of the includes and may not be sufficient in all situations. This problem has been fixed. The support headers have been updated to specifically include what they use as to not rely on transitive includes. Note that this change affects the compatibility. Read more.
When starting MERLIC RTE from the command line and using the command line argument " --image_source_config_ports " to define ports for the image source configuration, the specified ports were not correctly validated which could led to unwanted behavior. This problem has been fixed. The validation is now performed as described in the MERLIC documentation.
Interfaces for Process Integration
Enhancements
MERLIC now supports adding multiple instances of the "OPC UA" plug-in. In previous version of MERLIC, only one instance of the "OPC UA" plug-in was supported due to technical restrictions which have now been lifted.
Fixed Problems
When using the "OPC UA" plug-in, variables with a "Bad" status code were not set to the value "Null". This problem has been fixed. If a variable has a "Bad" status code, its value is now set to "Null" in accordance with the "OPC UA Specification Part 4 - Services", section 7.7 DataValue". This update affects the state machine variables, for example, "CurrentState" and the result variables in the JobExecutor object.
MERLIC RTE Setup
New Features
The services for the configuration and execution of communication plug-ins via the "Communication" tab of the MERLIC RTE Setup are now provided by MERLIC RTE. With the changes to MERLIC RTE, it is no longer required launch a dedicated MERLIC Communicator application to access the configuration in the "Communication" tab. Instead, only MERLIC RTE needs to be started to set up and control the execution of communication plug-ins. When MERLIC RTE Setup is connected to a system on which MERLIC RTE is running (local or remote), both the "Image Sources" tab and the "Communication" tab will be available for configuration. The MERLIC RTE Setup has been adjusted accordingly and all references to the former MERLIC Communicator have been removed.
Enhancements
The graphical user interface of the "Recipes" tab in the MERLIC RTE Setup has been improved. If the name of the MERLIC recipe was truncated because it was too long, it was previously not possible to see the full recipe name without increasing the width of the window. Now, a tooltip with the name of the recipe will be displayed when hovering the mouse pointer over the recipe name.
Fixed Problems
In the "Recipes" tab of the MERLIC RTE Setup, the layout of the table showing the list of available MERLIC recipes was not correctly aligned. This problem has been fixed.
MERLIC Creator
New Features
MERLIC Creator now supports adding notes to MERLIC tools and tool groups within the MVApp. A note can be added directly at the tool board of a MERLIC tool or a tool group. When saving the MVApp, the respective notes will also be saved. This allows users to add custom notes, for example, explaining the current parameter configuration of the tool. Existing tool notes can be visualized directly in the tool board or in the Tool Flow panel when hovering the mouse pointer over the respective tool. Note that this change affects the compatibility. Read more.
Improved Usability
"License Agreement": Shows the license agreement for the respective MERLIC version.
"Third-Party Licenses": Lists all license information of third-party software used by MERLIC.
The layout of the tool name label at the tool boards has been improved for facilitating renaming tools. Previously, it was difficult to recognize that any user action is possible on the label. To make this easier for the user, a hover effect has been added. When hovering the mouse pointer over the tool name label, the color changes to visualize that user actions are possible. In addition, now only a single click is necessary to open the renaming dialog instead of a double-click.
The layout of the "MERLIC Trial" dialog that is displayed when using MERLIC in trial mode has been improved. Previously, the dialog was much larger than required and the layout differed from other MERLIC dialogs. Now, the "MERLIC Trial" dialog is displayed in the same style as other MERLIC message dialogs.
The "About" dialog of MERLIC Creator has been revised to make it easier to find and access information on the license agreement and the used third-party licenses. Previously, this information could be accessed from the "About" dialog, which was sometimes hard to find. Now, the information can be accessed directly via the "Help" menu in MERLIC Creator. For this, we extended the "Help" menu in MERLIC Creator with the following new menu entries:
Fixed Problems
The information that was provided in the "About" dialog on the trial version of MERLIC differed from the description in the MERLIC documentation. This problem has been fixed. The information has been synchronized to provide a consistent description.
When right-clicking on an empty area in the Tool Flow panel to open the context menu and then navigating to "Insert Tool", the "Delete" and "Copy" options were sometimes erroneously activated. This problem has been fixed.
The styling and layout of the tool message dialogs were not correct and did not fit the layout of other MERLIC components. This problem has been fixed. Tool messages are now displayed in a modal window in the same layout as other MERLIC windows. In addition, detailed information is now provided as an expandable text below the main message to be more visible.
Pressing the "Del" key in the MERLIC Creator always opened a dialog for confirming the deletion of a MERLIC tool, even if no tool was selected. In addition, clicking on the "Insert tool" entry in the context menu of the Tool Flow panel erroneously activated other context menu entries. These problems have been fixed.
There were a few spelling mistakes in German user interface texts of the MERLIC Creator. This problem has been fixed.
When using the keyboard shortcut F1 in the "Custom Tools" tab of the MERLIC preferences to open the context-sensitive help, the MERLIC manual was opened with the wrong description. This problem has been fixed.
Renaming an input trigger of a MERLIC tool did not work correctly. This problem has been fixed.
If MERLIC Creator was started from command line using a path in which the letter for the system drive was written in lower case, the quickinfo was not displayed correctly in MERLIC Creator. This problem has been fixed.
When grouping a training tool together with another tool that preprocesses the input image of the training tool, for example, "Rotate Image" or "Crop Image", the respective training area in MERLIC Creator and the training widget in the MERLIC Frontend showed the wrong image for the preview of the processing image. The non-preprocessed input image of the group was shown instead of the input image of the training tool within the group. This problem has been fixed.
If the Tool Library had keyboard "focus" but no tool or tool category was selected, MERLIC Creator crashed when pressing certain keys. This problem has been fixed.
MERLIC Frontend
New Features
The MERLIC Frontend is now available for Linux systems. This enables you to install and use the MERLIC Frontend directly on your Linux system. You can download the respective package from MVTec's download area.
Fixed Problems
When modifying a MVApp and opening the Frontend without saving the changes beforehand, the modification status of the MVApp was reset. When the MVApp was then closed without explicitly saving, the pop-up message asking to save the changes was not shown and the changes were lost. This problem has been fixed.
Sometimes, the menu bar of the MERLIC Frontend was not displayed correctly due to sizing issues and an "overflow menu" button was shown instead. This problem has been fixed. The menu bar now takes up as much vertical space as it needs.
Tools
New Features
The tool "Classify Image" now supports deep learning models for classification that have been extended for "Out-of-Distribution Detection" (OOD). This allows recognizing incorrect classification of objects or samples that differ significantly from the training data. For this, the tool has been extended by the new tool result "Out-of-Distribution Score" which indicates the degree of deviation from the trained class. In addition, the new tool parameter "Out-of-Distribution Threshold" allows adjusting the threshold for identifying Out-of-Distribution samples. Both the new parameter and result are provided as additional parameter and result, respectively, and they are only available if the used classifier was extended for OOD.
The tool "Read QR Code" has been extended by the new tool parameter "Contrast Tolerance" and the training result "Contrast Tolerance Out". The parameter allows defining a tolerance for the search with respect to local contrast variations, for example, in case of reflections. The corresponding training result returns the used tolerance value.
Enhancements
The tool "Find Objects" has been improved. Previously, the parameter "Orientation" could always be adjusted altough it was only effective if the used deep learning model was trained with oriented bounding boxes. Now, the parameter will be automatically deactivated and grayed out if the used model supports only axis-aligned bounding boxes.
The tool "Read QR Code" has been improved. Previously, MERLIC also found codes with smaller or larger module sizes than specified or QR codes only partially covered by the search ROI or processing region. With the new underlying HALCON version, the tool now adheres more strictly to the restrictions placed upon the QR codes by tool parameters such as "Minimum Module Size", "Maximum Module Size", "Minimum Code Version", "Maximum Code Version", as well as the search ROI or processing region.
Moreover, the tool parameter "Minimum Contrast" no longer has any effect in the new underlying HALCON version. Therefore, the parameter has been deactivated and the respective training result "Minimum Contrast Out" is no longer determined. Both the parameter and the result are now only provided for compatibility reasons, but they have no effect. Note that this change affects the compatibility. Read more.
Fixed Problems
Read Aztec Code
Read Data Matrix ECC 200
Read PDF417
Read QR Code
"Conform to Standard" and "Mirrored Code"
"Conform to Standard", "Maximum Gap Width", "Maximum Slant", and "Mirrored Code"
"Conform to Standard" and "Mirrored Code"
"Conform to Standard", "Maximum Gap Width", "Minimum Number of Position Patterns", and "Mirrored Code
Count in Backlight
Count Objects with Similar Gray Values
Count on Non-Uniform Background
Detect Stain
Locate Bright Tips
Locate in Back Light
Locate Objects with Similar Gray Values
Count Objects with Similar Gray Values
Count on Non-Uniform Background
Locate Objects with Similar Gray Values
When changing the parameters of the following tools via the sliders, the respective value ranges were not updated correctly.
In addition, the default value of the parameter "Maximum Area" was outside of the default range for the area. This problem occurred in the following tools:These problems have been fixed. The value range of the parameters are now correctly updated and the default value of the parameter "Maximum Area" has been changed to 125000 to fit the default value range.When connecting a tool result to a new dynamic parameter of the "Evaluate Expression" tool, the newly added parameter was empty if the connected tool result contained values with mixed semantic types, for example, a tuple with strings and integers. This problem has been fixed. The dynamic parameter will now be added with the semantic type "any" if the connected tool result contains values of different semantic types.
When using the tool "Find Objects" and setting the parameter "Overlap" to "0", the tool showed only one found instance per class. This problem has been fixed.
When adding one of the data code reading tools to the tool flow for the first time, the default values of some tool parameters were not correctly applied. The following tools and parameters were affected:
This problem has been fixed.When using a mouse click in the tool "Read Bar Code" to select a code for reading, the parameter value for "Minimum Identical Scanlines" was always reset to "2" although the parameter should not be adjusted automatically. This problem has been fixed.
When using the tool "Read QR Code", the parameter "Minimum Number of Position Patterns" offered the invalid parameter value "1" in the respective value list. This problem has been fixed.
When using the tool "Read Text and Numbers with Deep Learning" and changing the model file in the parameter "Reading Model File", it could be cumbersome to reset back to the default reading model file because the parameter did not provide a drop-down menu with a list of possible deep learning models. This problem has been fixed.
When using the tool "Read Text and Numbers with Deep Learning" and changing the mode from "read" to "detect and read", not all tool parameters that were previously disabled for the "read" mode were enabled again. This problem has been fixed.
Sometimes, a message pop-up within the graphic window of a MERLIC tool was displayed at a wrong position so that the text could not be read, for example, because it was displayed behind another message pop-up. This problem has been fixed. To give users who develop a custom MERLIC tool more flexibilty, we now provide a new interface procedure " Me_set_tposition_with_screen_offset " that allows defining the text position of message pop-ups with an additional offset value.
The tools in the tool category "Preprocessing > ROI" did not show any message when the parameters were connected to a previous tool and the respective values were empty or inconsistent. This problem has been fixed.
Examples
New Features
MERLIC has been extended by new example Dockerfiles and scripts for building containers to facilitate setting up MERLIC for usage in a containerized environment. The examples can be used as starting point to easily build and run custom containers tailored for the MERLIC Frontend and MERLIC RTE. The example Dockerfiles and scripts are provided after the installation of MERLIC in the sub-directory "examplescontainers" within the installation directory. It also contains a "Readme" file with a short description on how to use the Dockerfiles.
Fixed Problems
In the example MVApp "measure_distance_to_center_led.mvapp", the "Evaluate Expression" tool with custom name "txt Selected LED" used a wrong expression to generate the resulting text. The values for "Left" and "Right" were mixed up. This problem has been fixed.
Documentation
New Features
Classify Image
Detect Anomalies in the Global Context
Find Objects
Segment Image Pixel-Precisely
The MERLIC manual has been extended by information on using MERLIC RTE on Linux systems. The documentation for Linux systems was previously provided in a separate PDF file. Now, the Linux-specific information is available in the regular MERLIC manual.
The documentation of the MERLIC tools using deep learning technology has been extended in the MERLIC manual. It now provides information on which MERLIC tools support deep learning models that have been optimized for an Acceleration Interface (AI²). For this, the tool reference of the following tools has been extended with the respective information:
Enhancements
MERLIC Runtime Environment
MERLIC RTE Setup
Communication and I/O Plug-ins for MERLIC RTE
This chapter provides general information on the MERLIC state machine and the setup of the MVApps, the recipe files, and the respective communication plug-ins that shall be used for the process integration. It also provides information on starting and configuring MERLIC RTE and communication plug-ins, as well as the configuration options during MERLIC RTE.
This chapter provides general information on the MERLIC RTE Setup, how to open it and how to connect it to a local or remote system. In addition, general information on each configuration tab of the MERLIC RTE Setup is provided.
This chapter provides the documentation of the supported communication plug-ins and I/O plug-ins. In the subchapter for the I/O plug-ins, the information of each type of supported I/O device is now clearly structured and much easier to find.
The documentation of MERLIC RTE, the process integration mode of MERLIC, has been revised in the MERLIC manual to reflect the changes of MERLIC RTE. As a result, the "MERLIC Communicator Manual" that was provided in previous MERLIC versions has been removed. The respective documentation of communication plug-ins, previously called Communicator plug-ins, has been moved to the MERLIC manual. The information related to MERLIC RTE can now be found in the following chapters:
In addition, the information related to MERLIC RTE has been adjusted accordingly in all other chapters of the MERLIC manual.The documentation of the "MELSEC Communication", "MODICON", and "SIMATIC S7" plug-ins has been improved. The description of the user parameter categories "Writing Data to PLC Memory" and "Reading Data from PLC Memory" has been revised to be more clear. In addition, all other pages of the respective chapters have been revised for consistency and small fixes.
The documentation of the tool "Find Objects" has been improved. The description with respect to the differences between the supported deep learning models has been revised and is now more clear.
The documentation of the API Reference for the development of communication plug-ins has been revised to reflect the changes of MERLIC RTE. As a result, the "Communicator API Reference" has been renamend to "Communication Plug-in Development Manual". The previous content has been revised and the manual now contains comprehensive documentation relevant for the implementation of custom communication plug-ins. In addition, the structure of the contents has been adjusted to provide a clear overview and to make it easier to find the relevant information.
The documentation of the "SIMATIC S7" plug-in has been improved. Previously, it was only available in English. Now, the documentation has been translated and is also available in German, Japanese, and simplified Chinese.
Fixed Problems
When copying code snippets from the documentation using the embedded "Copy" button, spaces were copied as non-breaking spaces. This could lead to problems when integrating the copied snippet, for example, when copying JSON formatted content intended for use with the MQTT plug-in. This problem has been fixed.
In the MERLIC manual, some parts of the documentation of the INI options for the color settings was wrong. The name of the INI section was erroneously mentioned as " [Colors] " instead of " [colors] ". In addition, the description of some color settings was not very clear. These problems have been fixed.
The documentation of the Designer widgets "Rectangle" and "OK/NOK" did not list all MVApp examples that use these widgets in the section of example applications. In addition, the documentation of the "Tab View" widget listed some example MVApps although these MVApps don't use the widget. These problems have been fixed.
In the Chinese translation of the user interface and MERLIC documentation, the term "tuple" was not translated. This problem has been fixed.
The translation of the log levels in the MERLIC manual did not match the translation in the user interface of the MERLIC preferences dialog. This problem has been fixed.
The documentation of the "SIMATIC S7" plug-in mentioned a wrong user parameter name in the example description for the parameter of category "Reading Data from PLC Memory". This problem has been fixed.
In the MERLIC manual, the description on page "MERLIC Creator > Creating a MERLIC Vision App > Selecting Tools" contained a wrong hyperlink. This problem has been fixed.
Installation
New Features
The tar archive for MERLIC RTE on Linux systems now also includes the package for "CodeMeter Runtime", the licensing softare used by MERLIC. This facilitates getting started with MERLIC RTE on Linux systems as it is no longer required to manually look for the correct version of "CodeMeter Runtime" and to download the respective package. After installing MERLIC RTE, the package for "CodeMeter Runtime" is provided in a dedicated subdirectory "codemeter". This subdirectory also includes a trial license for MERLIC RTE. Testing MERLIC RTE on Linux system is therefore now much easier as the trial license no longer needs to be requested separately.
Licensing
Fixed Problems
The MERLIC RTE Setup erroneously locked additional licensing add-ons during the startup. If the MERLIC RTE Setup was connected to a MERLIC Creator or MERLIC RTE of a different MERLIC version, the add-ons were therefore sometimes not accessible. This problem has been fixed. It is recommended to use the respective MERLIC components of the same MERLIC version.
Miscellaneous
The AI² interfaces that are optionally used for the deep learning tools have been updated. MERLIC now contains the following versions of the interfaces:
OpenVINO: Revision 21.05.5
TensorRT: Revision 23.11.4
The log files for MERLIC Creator and MERLIC RTE showed some misleading warnings about non-existing translation files that could not be loaded. This problem has been fixed.
To profit from the improvements of the new HALCON version, the HALCON libraries used by MERLIC have been upgraded to the HALCON 24.11 Progress-Steady version. Note that this change affects the compatibility. Read more.
Release Notes for Windows Systems Only
In this section, you can find the release notes that apply only for Windows systems.
When uninstalling MERLIC, the installation directory was not completely cleaned up, leaving some empty directories behind. This problem has been fixed. Now, the installation directory will be completely removed, unless the directory contains additional files or directories that were added manually.
Compiling a communication plug-in that uses the C++ support library with the Visual Studio 2022 17.12 compiler failed with an error about an unexpected token in the header " <mvtec/plugin-support/v1/Config/detail/ParameterPackHelper.h>" . This problem has been fixed.
Release Notes Linux Systems Only
In this section, you can find the release notes that apply only for Linux systems.
Many of the Linux binaries, in particular the communication plug-ins, were previously not "stripped" of symbols and debug information, leading to significantly larger binary sizes compared to their Windows counterparts. This problem has been fixed.
On Linux systems, the "OPC UA" plug-in failed to initialize if FD_SETSIZE was set to a higher value than expected. This problem has been fixed. The Unified Automation OPC UA SDK has been updated to version 1.8.6.
Known Issues
The following issue is already known and in development process. It will be fixed for upcoming releases.
In frequent cases, when using TensorRT™ accelerated processing units in MERLIC tools with deep learning technology, MERLIC crashes if the required memory for the deep learning model exceeds the available memory on the GPU.
When an instance of MERLIC Creator or MERLIC RTE of version 5.0 is remotely configured using a MERLIC RTE Setup 5.1 or newer, removing an image source from a configuration will cause the Creator or RTE application to crash. We recommend to upgrade Creator/RTE to the current version or, in lieu of that, to use RTE Setup 5.0 to configure Creator/RTE 5.0.
When an instance of MERLIC Creator or MERLIC RTE of version 5.2 (or newer) is remotely configured using a MERLIC RTE Setup 5.1, it is not possible to rename image sources or configurations, despite the fact that this feature has been added in MERLIC 5.1. We recommend upgrading the MERLIC RTE Setup to version 5.2.
Legal Notes :
Modicon® is a registered trademark of Schneider Electric USA, Inc.
Intel, the Intel logo, OpenVINO, the OpenVINO logo, and Movidius are trademarks of Intel Corporation or its subsidiaries.
 售前咨询专员
售前咨询专员
